
Kozuma laboratory
Quantum Navigation Research Center,
Institute of Integrated Research,
Institute of Science Tokyo
Institute of Integrated Research,
Institute of Science Tokyo
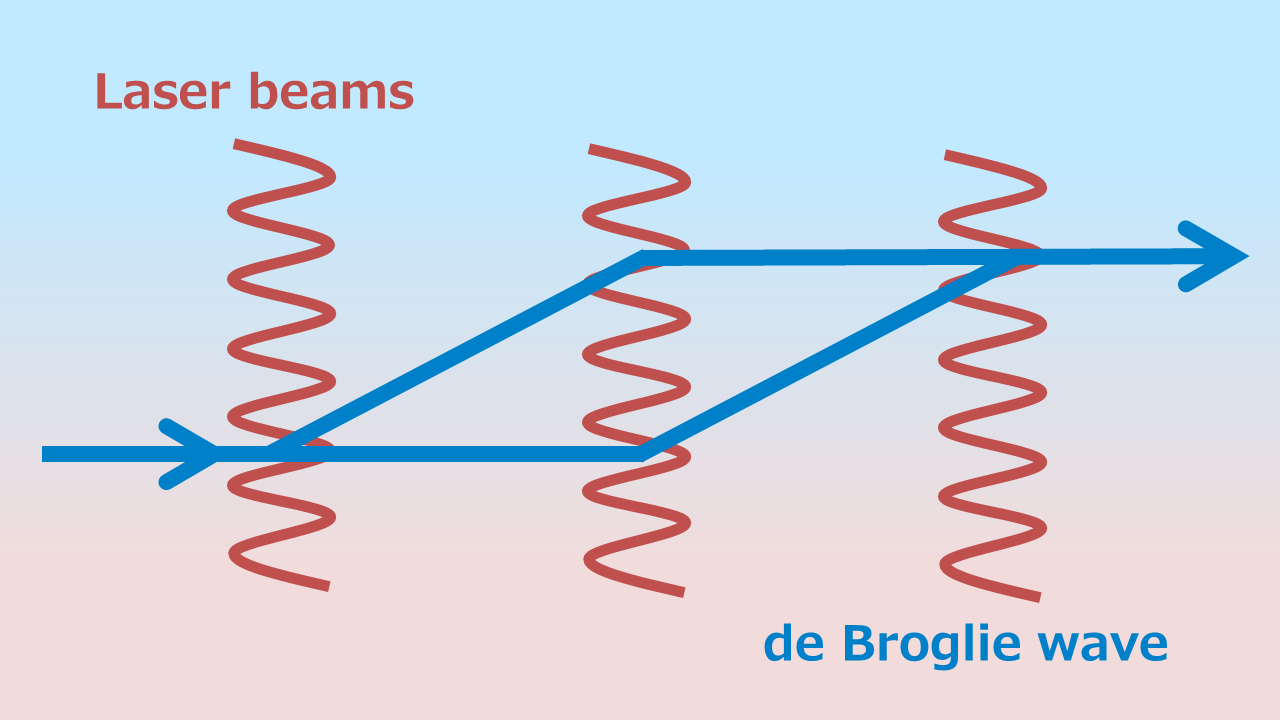
Atom interferometry (AI) using atomic de Broglie wave enables us to implement ultra-precise inertial sensor. We intend to utilize AI gyroscope for securing safety in automatic driving cars and for improving the efficiency of marine resource exploration using autonomous underwater vehicles.
With the help of satellite positionings such as the GPS, we are now able to reach the destination without checking the map. Satellite positioning provides us with various applications such as automatic driving cars, marine resource exploration, road pricing, IT agriculture, disaster report, safety confirmation and so on.
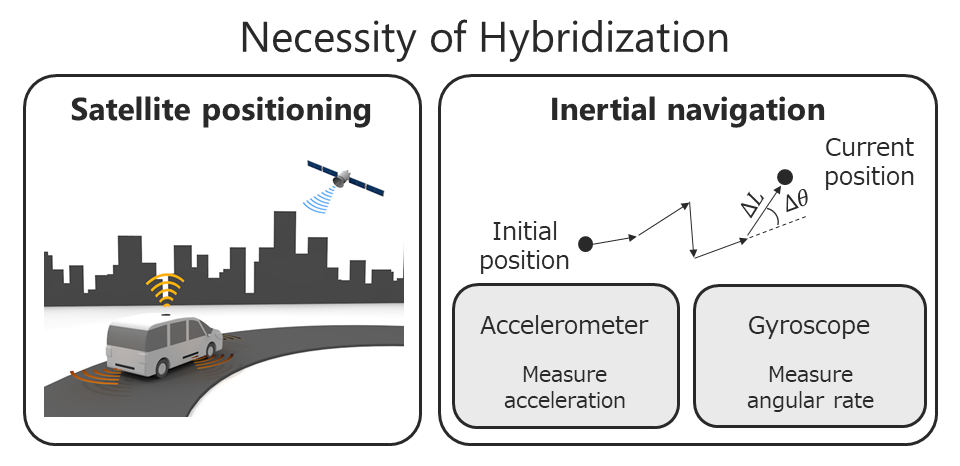
However, such a satellite positioning system works only when the radio wave environment is good. It is hard to keep receiving the radio waves from satellites steadily in the urban space where there exists a lot of tall buildings and elevated bridges. It is needless to say that radio wave attenuates rapidly in the water and the satellites positioning thus does not work under the sea. Furthermore, it is possible to perform "jamming " and "deceiving" the satellite signals. It is inevitable to hybridize the satellite positioning and another self-localization method which does not require external signals.
By integrating the outputs of accelerometer and gyroscope with respect to the time, we can get the information on the displacement and the angle variation. By adding up them, we can estimate the current position without the help of external signals. Such a system is called inertial navigation. The aircraft uses the inertial navigation system as the main, and GPS is used as a secondary to realize safe navigation. In the case of the car navigation, the satellite positioning is hybridized with the inertial navigation system so that it functions even in a tunnel or other place where radio waves do not reach. Inertial navigation systems are widely utilized for ships, autonomous underwater vehicles (AUV), satellites, etc.
Does the current inertial navigation system have sufficient performance to support various consumer applications? Let me first discuss the automatic driving car. Full automation of road traffic is inevitable for realizing smart logistics and securing the safety of driving when we consider the low birthrate and longevity. To achieve an automated driving system of level 3 or higher, we have to realize 1. line-keeping, and 2. recognizing and avoiding obstacles. These demands are considered to be achieved by the satellite positioning system, sensing using LIDAR (Laser Imaging Detection and Ranging), and machine learning with the stereo camera. However, when the car is surrounded by high building, satellite positioning breaks. Under snowing, LIDAR / camera cannot detect the center line. Operation collapses under relatively ordinarily circumstances. You may think that you can pause and wait for re-reception of the satellite signal, but then you can not avoid a massive traffic jam. Although there is also an idea to arrange antennas at various places on the road and to grasp the position of the car by using radio waves emitted from them, it will be inevitable that a huge budget will be required for infrastructure maintenance.
The ultra-precise inertial navigation system has the power to compensate for weak points without interfering with the various methods described above. Even if the satellite positioning system, LIDAR, stereo camera, or any of these cannot recognize the center line, lane keeping becomes possible if the ultra-precise inertial navigation system is available. Moreover, such the system enables us to widen the interval at which the antennas are arranged, and considerable cost reduction can be expected in infrastructure maintenance. Furthermore, if the satellite positioning system and the ultra-precise inertial navigation system are hybridized, the radio wave deception can be easily detected, since a clear difference appears between the outputs of both. Does the current inertial navigation system have sufficient performance to realize such lane keeping? While the missing time of the satellite signal will be the order of several minutes at most, it is difficult to perform lane keeping because a meter level error occurs even for the high-end type of INS.
Next, we want to discuss AUV. The situation surrounding Japan, which has been regarded as scarce in resources, is gradually changing. Recent studies have recognized that resources such as petroleum, natural gas, methane hydrate, hydrothermal deposits including rare-metals are abundantly buried in exclusive economic zones surrounding Japan. Amount of deposit for methane hydrate is expected to be equivalent to 100 years of annual natural gas consumption. That for rare metals is believed to be equal to 200 years of domestic use. To utilize these "sleeping resources," it is urgent to develop technologies to more accurately identify the position of resources. AUV can approach various resources directly compared to the survey vessels.
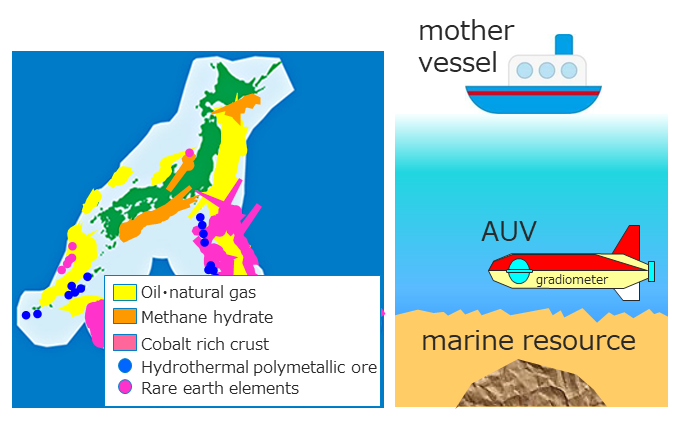
Although an AUV has such excellent advantages, in reality, it has a big problem that there is no way to get the accurate position information in the water. It takes around 10 hours for AUV to dive into the 10km depth of ocean floor and levitate again. Since radio waves do not reach in the water, for AUV to get the position information without relying on acoustic signals from the mother ship, there is no choice but to use the inertial navigation system. However, the current position estimation accuracy is not sufficient; it is said that an error of several kilometers occurs only by dive/levitation. Marine resource exploration is worth only when precise latitude/longitude information is linked to observed data. So the accuracy improvement of the inertial navigation system is a top priority issue.
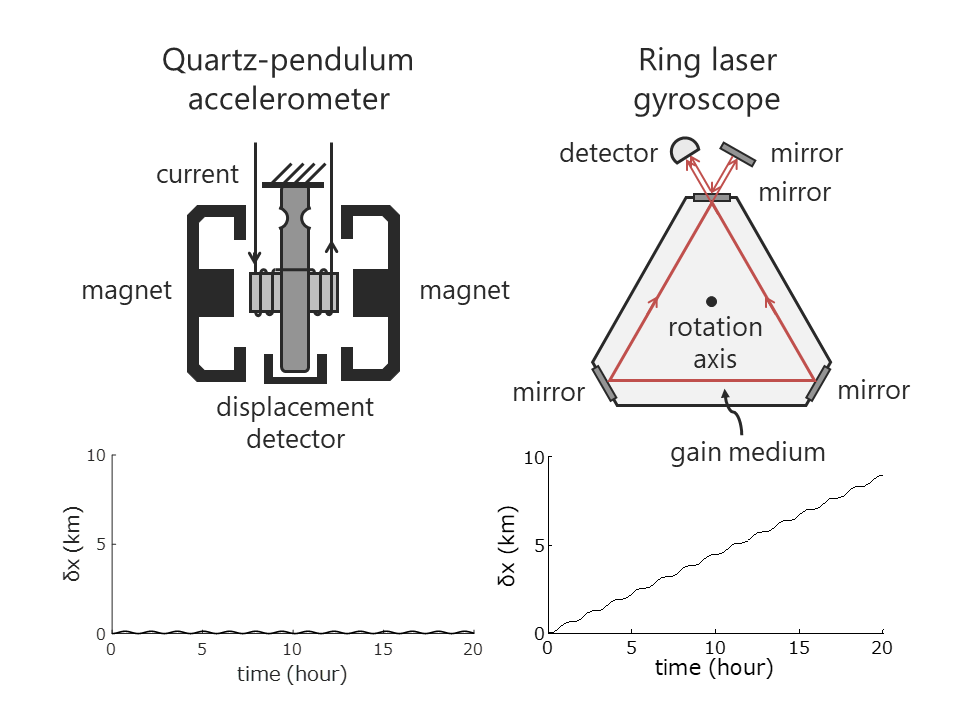
Which inertial measurement unit limits the performance of INS? High-end INS utilizes both accelerometer and gyroscope described below. Quartz pendulum type of accelerometer is often used for INS. When the unit is accelerated, the pendulum tries to bend, but by flowing the current to an electric magnet, the position of the pendulum is kept in the neutral position. Now the output current gives us the value of acceleration. This type of accelerometer is small, several tens of cc and is highly precise. The drift of output is around ten micro g.
About the angular rate measurement, the ring laser gyroscope provides us with the highest performance. When an optical cavity is assembled by three mirrors, both clockwise and counterclockwise direction of laser oscillations are allowed at the same time. Rotating the gyroscope leads to a frequency difference due to Sagnac effect. The beat frequency between these two modes reflects the angular rate. The output drift of the ring laser gyro is typically the order fo a few mdeg / h. The position error originated from accelerometer drift oscillates at a constant period, i.e., Shuler's cycle (~ 84 minutes) and does not expand with time. Here the Schuler's period is that for the pendulum with its length of the radius of the earth. On the other hand, position error originated from the gyroscope linearly expands with time while oscillating in the Shuler's cycle. Therefore, the accuracy of the INS is dominated by the performance of the gyroscope.
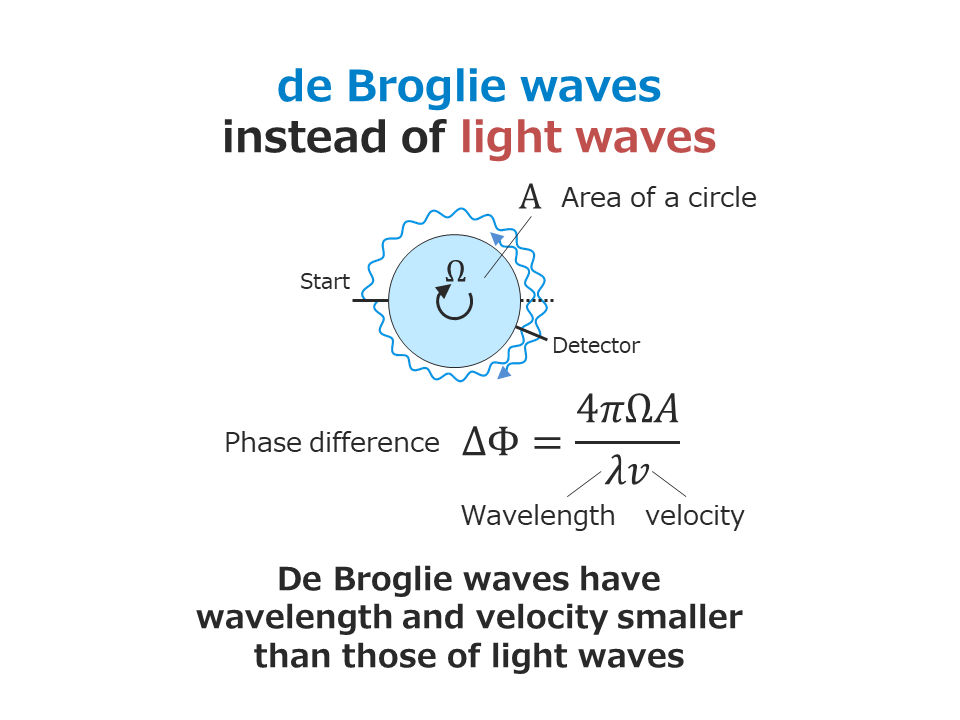
As was explained earlier, the ring laser gyroscope uses the Sagnac effect which causes a frequency difference between two laser modes. The phase difference generated by the Sagnac effect is in inversely proportional to the wavelength and the velocity of the wave utilized for constructing the Sagnac interferometer. The performance of the gyroscope thus can be drastically improved by using a wave having wavelength and velocity much smaller than those of the light wave. It is a concept of the atom interferometer (AI) gyroscope where we employ de Broglie waves of atoms instead of light waves. Calculating product between wavelength and velocity for the light wave and the atom de Broglie wave, we can understand that their ratio corresponds to that between photon energy to atomic mass-energy, which is the order of 10 10 !
We are aiming to realize a compact and portable AI gyroscope using cold atoms and implement the ultra-precise inertial navigation system. This research is the theme of the JST Mirai large project that has begun on Nov 1, 2017. For details, please see the following URL.
